[알고리즘] 그래프-너비 우선 탐색, 깊이 우선 탐색, 최단경로 알고리즘(다익스트라 알고리즘), 최소 신장트리 알고리즘(크루스칼 알고리즘, 프림 알고리즘)

*** 아래의 내용은 패스트 캠퍼스 알고리즘 강의 자료(이준희 강사님 저)를 강의를 들으면서 정리한 내용입니다. ***
1. 그래프 (Graph) 이해
(1) 그래프 기본 개념
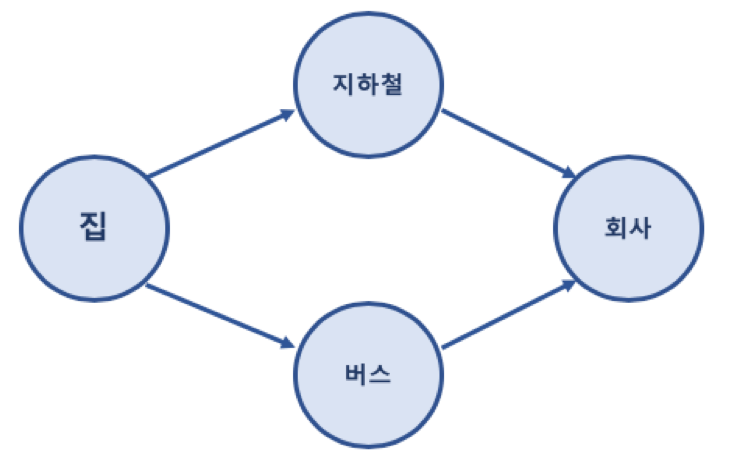
- 그래프는 실제 세계의 현상이나 사물을 정점(Vertex) 또는 노드(Node) 와 간선(Edge)로 표현하기 위해 사용
- 예제 집에서 회사로 가는 경로를 그래프로 표현한 예
(2) 그래프 (Graph) 관련 용어
- 노드 (Node): 위치를 말함, 정점(Vertex)라고도 함
- 간선 (Edge): 위치 간의 관계를 표시한 선으로 노드를 연결한 선이라고 보면 됨 (link 또는 branch 라고도 함)
- 인접 정점 (Adjacent Vertex) : 간선으로 직접 연결된 정점(또는 노드)
참고 용어
- 정점의 차수 (Degree): 무방향 그래프에서 하나의 정점에 인접한 정점의 수
- 진입 차수 (In-Degree): 방향 그래프에서 외부에서 오는 간선의 수
- 진출 차수 (Out-Degree): 방향 그래프에서 외부로 향하는 간선의 수
- 경로 길이 (Path Length): 경로를 구성하기 위해 사용된 간선의 수
- 단순 경로 (Simple Path): 처음 정점과 끝 정점을 제외하고 중복된 정점이 없는 경로
- 사이클 (Cycle): 단순 경로의 시작 정점과 종료 정점이 동일한 경우
단순 경로 (A-B-C)
(3)그래프 (Graph) 종류
1)무방향 그래프 (Undirected Graph)
- 방향이 없는 그래프
- 간선을 통해, 노드는 양방향으로 갈 수 있음
- 보통 노드 A, B가 연결되어 있을 경우, (A, B) 또는 (B, A) 로 표기
방향 그래프 (Directed Graph)
- 간선에 방향이 있는 그래프
- 보통 노드 A, B가 A -> B 로 가는 간선으로 연결되어 있을 경우, <A, B> 로 표기 (<B, A> 는 B -> A 로 가는 간선이 있는 경우이므로 <A, B> 와 다름)
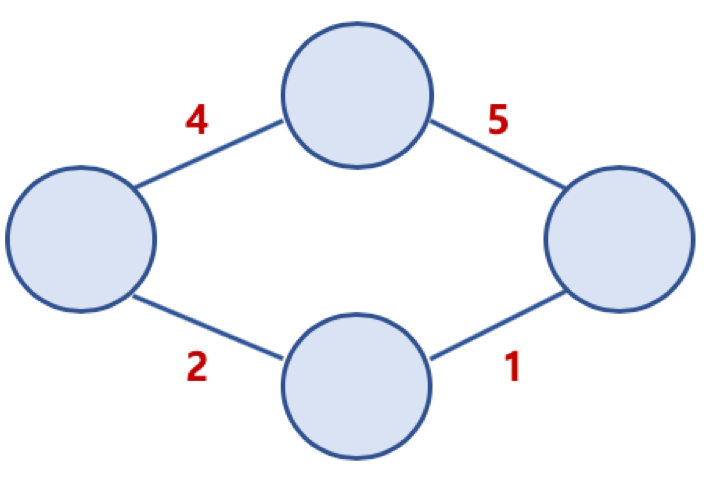
가중치 그래프 (Weighted Graph) 또는 네트워크 (Network)
- 간선에 비용 또는 가중치가 할당된 그래프
연결 그래프 (Connected Graph) 와 비연결 그래프 (Disconnected Graph)
연결 그래프 (Connected Graph)
- 무방향 그래프에 있는 모든 노드에 대해 항상 경로가 존재하는 경우
비연결 그래프 (Disconnected Graph)
- 무방향 그래프에서 특정 노드에 대해 경로가 존재하지 않는 경우

비연결 그래프
사이클 (Cycle) 과 비순환 그래프 (Acyclic Graph)
사이클 (Cycle)
- 단순 경로의 시작 노드와 종료 노드가 동일한 경우
비순환 그래프 (Acyclic Graph)
- 사이클이 없는 그래프

비순환 그래프
완전 그래프 (Complete Graph)
- 그래프의 모든 노드가 서로 연결되어 있는 그래프
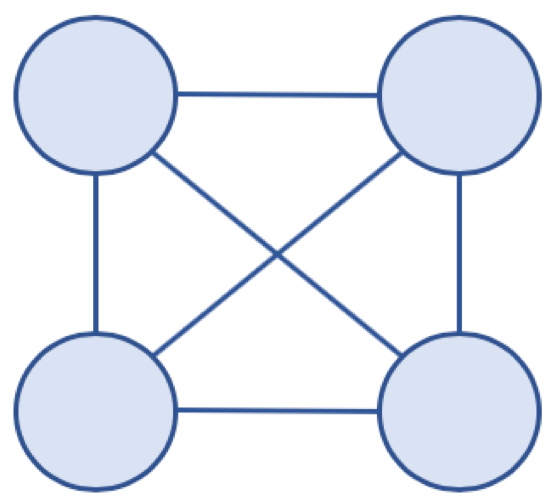
완전 그래프
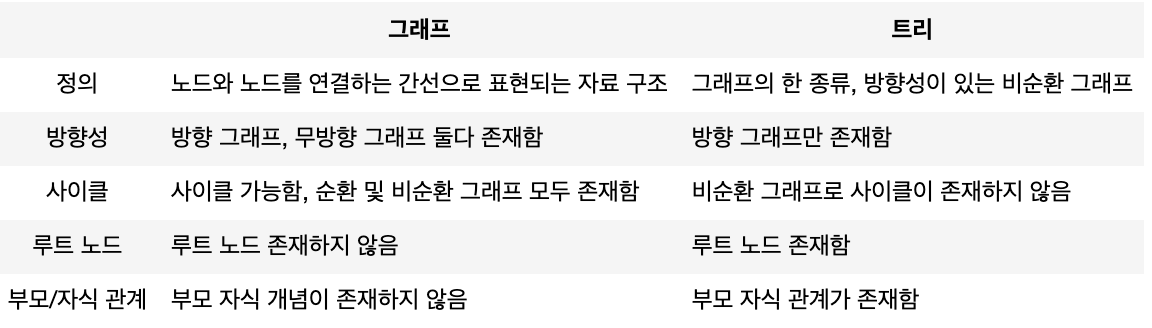
그래프와 트리의 차이
- 트리는 그래프 중에 속한 특별한 종류라고 볼 수 있음
2. BFS 와 DFS 란?
- 대표적인 그래프 탐색 알고리즘
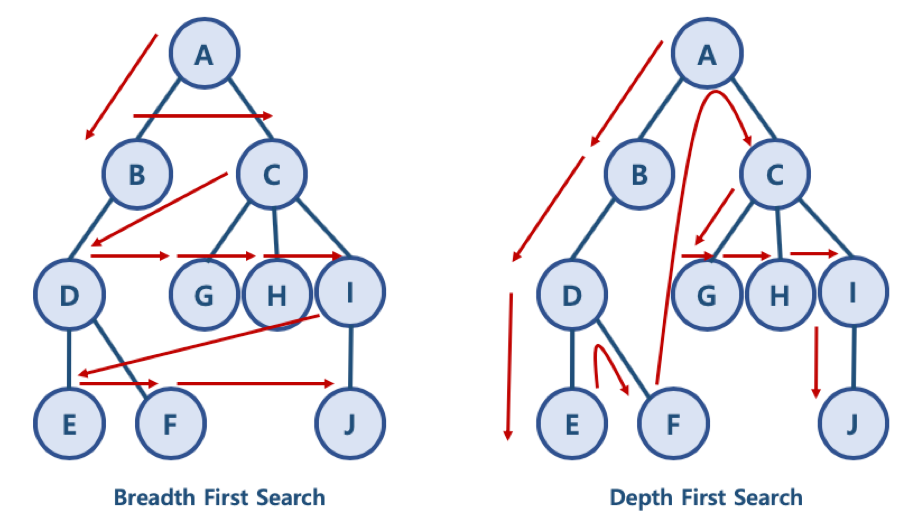
- 너비 우선 탐색 (Breadth First Search): 정점들과 같은 레벨에 있는 노드들 (형제 노드들)을 먼저 탐색하는 방식
- 깊이 우선 탐색 (Depth First Search): 정점의 자식들을 먼저 탐색하는 방식
BFS/DFS 방식 이해를 위한 예제
- BFS 방식: A — B — C — D — G — H — I — E — F — J
- 한 단계씩 내려가면서, 해당 노드와 같은 레벨에 있는 노드들 (형제 노드들)을 먼저 순회함
- DFS 방식: A — B — D — E — F — C — G — H — I — J
- 한 노드의 자식을 타고 끝까지 순회한 후, 다시 돌아와서 다른 형제들의 자식을 타고 내려가며 순화함
BFS와 DFS
그래프 표현 예

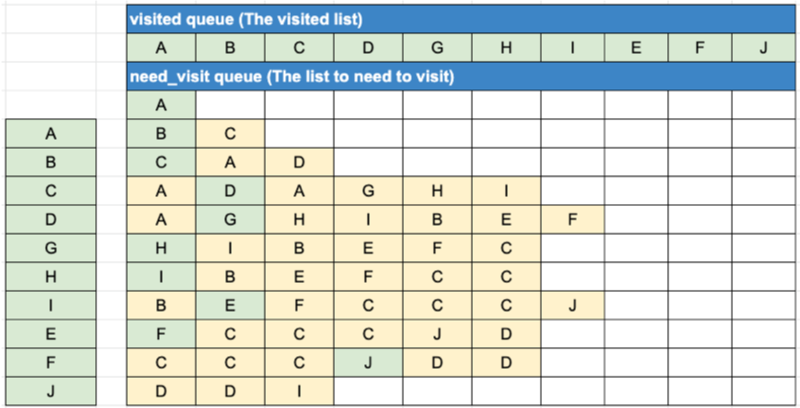
DFS 알고리즘 구현
- 자료구조 스택과 큐를 활용함
- need_visit 스택과 visited 큐, 두 개의 자료 구조를 생성
- BFS 자료구조는 두 개의 큐를 활용하는데 반해, DFS 는 스택과 큐를 활용한다는 차이가 있음을 인지해야 함
DFS 시간 복잡도
- 일반적인 DFS 시간 복잡도
- 노드 수: V
- 간선 수: E
- 시간 복잡도: O(V + E)
BFS 알고리즘 구현
- 자료구조 큐를 활용함
- need_visit 큐와 visited 큐, 두 개의 큐를 생성
BFS 시간 복잡도
- 일반적인 BFS 시간 복잡도
- 노드 수: V
- 간선 수: E
- 시간 복잡도: O(V + E)
3. 최단 경로 알고리즘
1) 최단 경로 문제란?
- 최단 경로 문제란 두 노드를 잇는 가장 짧은 경로를 찾는 문제임
- 가중치 그래프 (Weighted Graph) 에서 간선 (Edge)의 가중치 합이 최소가 되도록 하는 경로를 찾는 것이 목적
최단 경로 문제 종류
- 단일 출발 및 단일 도착 (single-source and single-destination shortest path problem) 최단 경로 문제
- 그래프 내의 특정 노드 u 에서 출발, 또다른 특정 노드 v 에 도착하는 가장 짧은 경로를 찾는 문제
2. 단일 출발 (single-source shortest path problem) 최단 경로 문제
- 그래프 내의 특정 노드 u 와 그래프 내 다른 모든 노드 각각의 가장 짧은 경로를 찾는 문제
- 따지고 보면 굉장히 헷갈릴 수 있으므로 명확히 하자면, 예를 들어 A, B, C, D 라는 노드를 가진 그래프에서 특정 노드를 A 라고 한다면, A 외 모든 노드인 B, C, D 각 노드와 A 간에 (즉, A — B, A — C, A — D) 각각 가장 짧은 경로를 찾는 문제를 의미함
3. 전체 쌍(all-pair) 최단 경로: 그래프 내의 모든 노드 쌍 (u, v) 에 대한 최단 경로를 찾는 문제
2) 최단 경로 알고리즘 — 다익스트라 알고리즘
- 다익스트라 알고리즘은 위의 최단 경로 문제 종류 중, 2번에 해당
- 하나의 정점에서 다른 모든 정점 간의 각각 가장 짧은 거리를 구하는 문제
다익스트라 알고리즘 로직
- 첫 정점을 기준으로 연결되어 있는 정점들을 추가해 가며, 최단 거리를 갱신하는 기법
- 다익스트라 알고리즘은 너비우선탐색(BFS)와 유사
- 첫 정점부터 각 노드간의 거리를 저장하는 배열을 만든 후, 첫 정점의 인접 노드 간의 거리부터 먼저 계산하면서, 첫 정점부터 해당 노드간의 가장 짧은 거리를 해당 배열에 업데이트
- 다익스트라 알고리즘의 다양한 변형 로직이 있지만, 가장 개선된 우선순위 큐를 사용하는 방식에 집중해서 설명하기로 함
우선순위 큐를 활용한 다익스트라 알고리즘
- 우선순위 큐는 MinHeap 방식을 활용해서, 현재 가장 짧은 거리를 가진 노드 정보를 먼저 꺼내게 됨
- 1) 첫 정점을 기준으로 배열을 선언하여 첫 정점에서 각 정점까지의 거리를 저장
- 초기에는 첫 정점의 거리는 0, 나머지는 무한대로 저장함 (inf 라고 표현함)
- 우선순위 큐에 (첫 정점, 거리 0) 만 먼저 넣음
- 2) 우선순위 큐에서 노드를 꺼냄
- 처음에는 첫 정점만 저장되어 있으므로, 첫 정점이 꺼내짐
- 첫 정점에 인접한 노드들 각각에 대해, 첫 정점에서 각 노드로 가는 거리와 현재 배열에 저장되어 있는 첫 정점에서 각 정점까지의 거리를 비교한다.
- 배열에 저장되어 있는 거리보다, 첫 정점에서 해당 노드로 가는 거리가 더 짧을 경우, 배열에 해당 노드의 거리를 업데이트한다.
- 배열에 해당 노드의 거리가 업데이트된 경우, 우선순위 큐에 넣는다.
- 결과적으로 너비 우선 탐색 방식과 유사하게, 첫 정점에 인접한 노드들을 순차적으로 방문하게 됨
- 만약 배열에 기록된 현재까지 발견된 가장 짧은 거리보다, 더 긴 거리(루트)를 가진 (노드, 거리)의 경우에는 해당 노드와 인접한 노드간의 거리 계산을 하지 않음
3) 2번의 과정을 우선순위 큐에 꺼낼 노드가 없을 때까지 반복한다.
예제로 이해하는 다익스트라 알고리즘 (우선순위 큐 활용)
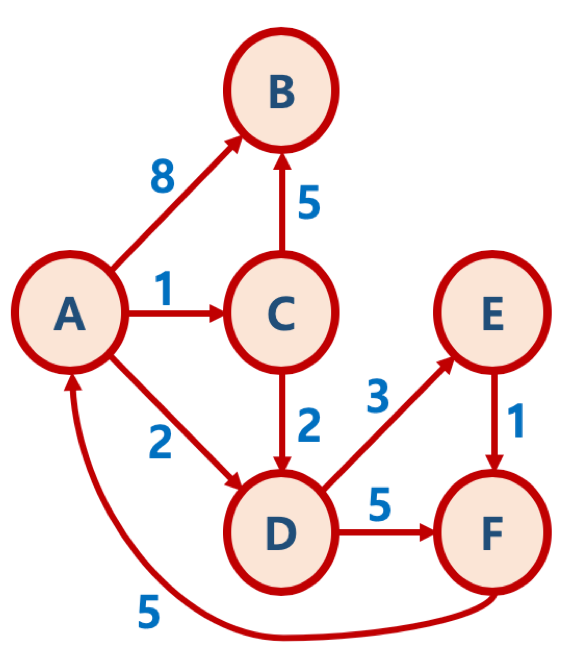
1단계: 초기화
- 첫 정점을 기준으로 배열을 선언하여 첫 정점에서 각 정점까지의 거리를 저장
- 초기에는 첫 정점의 거리는 0, 나머지는 무한대로 저장함 (inf 라고 표현함)
- 우선순위 큐에 (첫 정점, 거리 0) 만 먼저 넣음

2단계: 우선순위 큐에서 추출한 (A, 0) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- 우선순위 큐에서 노드를 꺼냄
- 처음에는 첫 정점만 저장되어 있으므로, 첫 정점이 꺼내짐
- 첫 정점에 인접한 노드들 각각에 대해, 첫 정점에서 각 노드로 가는 거리와 현재 배열에 저장되어 있는 첫 정점에서 각 정점까지의 거리를 비교한다.
- 배열에 저장되어 있는 거리보다, 첫 정점에서 해당 노드로 가는 거리가 더 짧을 경우, 배열에 해당 노드의 거리를 업데이트한다.
- 배열에 해당 노드의 거리가 업데이트된 경우, 우선순위 큐에 넣는다.
- 결과적으로 너비 우선 탐색 방식과 유사하게, 첫 정점에 인접한 노드들을 순차적으로 방문하게 됨
- 만약 배열에 기록된 현재까지 발견된 가장 짧은 거리보다, 더 긴 거리(루트)를 가진 (노드, 거리)의 경우에는 해당 노드와 인접한 노드간의 거리 계산을 하지 않음
- 이전 표에서 보듯이, 첫 정점 이외에 모두 inf 였었으므로, 첫 정점에 인접한 노드들은 모두 우선순위 큐에 들어가고, 첫 정점과 인접한 노드간의 거리가 배열에 업데이트됨
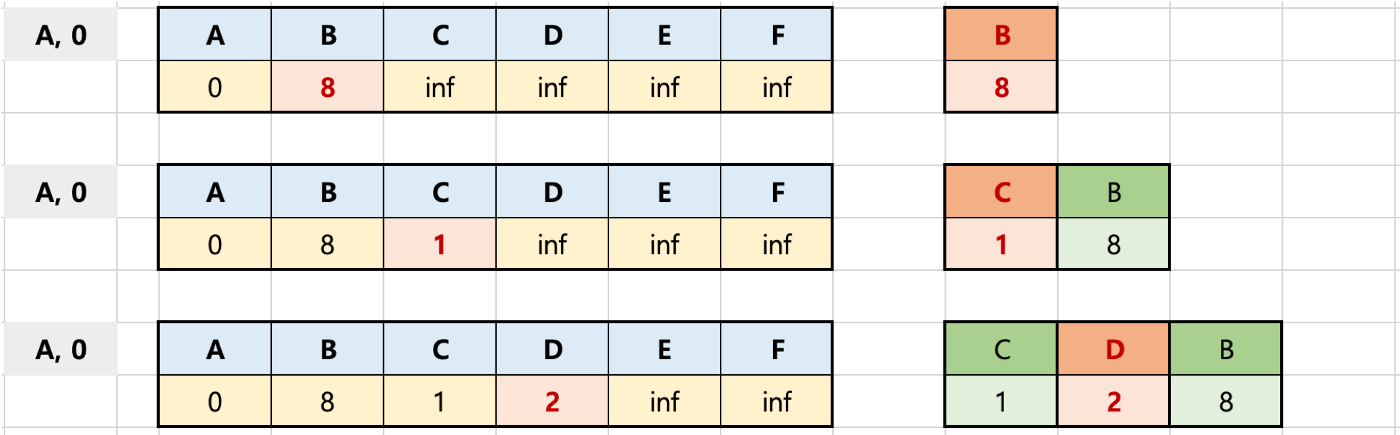
3단계: 우선순위 큐에서 (C, 1) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- 우선순위 큐가 MinHeap(최소 힙) 방식이므로, 위 표에서 넣어진 (C, 1), (D, 2), (B, 8) 중 (C, 1) 이 먼저 추출됨 (pop)
- 위 표에서 보듯이 1단계까지의 A — B 최단 거리는 8 인 상황임
- A — C 까지의 거리는 1, C 에 인접한 B, D에서 C — B는 5, 즉 A — C — B 는 1 + 5 = 6 이므로, A — B 최단 거리 8보다 더 작은 거리를 발견, 이를 배열에 업데이트
- 배열에 업데이트했으므로 B, 6 (즉 A에서 B까지의 현재까지 발견한 최단 거리) 값이 우선순위 큐에 넣어짐
- C — D 의 거리는 2, 즉 A — C — D 는 1 + 2 = 3 이므로, A — D의 현재 최단 거리인 2 보다 긴 거리, 그래서 D 의 거리는 업데이트되지 않음

4단계: 우선순위 큐에서 (D, 2) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- 지금까지 접근하지 못했던 E와 F 거리가 계산됨
- A — D 까지의 거리인 2 에 D — E 가 3 이므로 이를 더해서 E, 5
- A — D 까지의 거리인 2 에 D — F 가 5 이므로 이를 더해서 F, 7

5단계: 우선순위 큐에서 (E, 5) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- A — E 거리가 5인 상태에서, E에 인접한 F를 가는 거리는 1, 즉 A — E — F 는 5 + 1 = 6, 현재 배열에 A — F 최단거리가 7로 기록되어 있으므로, F, 6 으로 업데이트
- 우선순위 큐에 F, 6 추가

6단계: 우선순위 큐에서 (B, 6), (F, 6) 를 순차적으로 추출해 각 노드 기반으로 인접한 노드와의 거리 계산
- 예제의 방향 그래프에서 B 노드는 다른 노드로 가는 루트가 없음
- F 노드는 A 노드로 가는 루트가 있으나, 현재 A — A 가 0 인 반면에 A — F — A 는 6 + 5 = 11, 즉 더 긴 거리이므로 업데이트되지 않음

7단계: 우선순위 큐에서 (F, 7), (B, 8) 를 순차적으로 추출해 각 노드 기반으로 인접한 노드와의 거리 계산
- A — F 로 가는 하나의 루트의 거리가 7 인 상황이나, 배열에서 이미 A — F 로 가는 현재의 최단 거리가 6인 루트의 값이 있는 상황이므로, 더 긴거리인 F, 7 루트 기반 인접 노드까지의 거리는 계산할 필요가 없음, 그래서 계산없이 스킵함
- 계산하더라도 A — F 거리가 6인 루트보다 무조건 더 긴거리가 나올 수 밖에 없음
- B, 8 도 현재 A — B 거리가 6이므로, 인접 노드 거리 계산이 필요 없음.
우선순위 큐를 사용하면 불필요한 계산 과정을 줄일 수 있음

우선순위 큐 사용 장점
- 지금까지 발견된 가장 짧은 거리의 노드에 대해서 먼저 계산
- 더 긴 거리로 계산된 루트에 대해서는 계산을 스킵할 수 있음
시간 복잡도
위 다익스트라 알고리즘은 크게 다음 두 가지 과정을 거침
- 과정1: 각 노드마다 인접한 간선들을 모두 검사하는 과정
- 과정2: 우선순위 큐에 노드/거리 정보를 넣고 삭제(pop)하는 과정
각 과정별 시간 복잡도
- 과정1: 각 노드는 최대 한 번씩 방문하므로 (첫 노드와 해당 노드간의 갈 수 있는 루트가 있는 경우만 해당), 그래프의 모든 간선은 최대 한 번씩 검사
- 즉, 각 노드마다 인접한 간선들을 모두 검사하는 과정은 O(E) 시간이 걸림, E 는 간선(edge)의 약자
- 과정2: 우선순위 큐에 가장 많은 노드, 거리 정보가 들어가는 경우, 우선순위 큐에 노드/거리 정보를 넣고, 삭제하는 과정이 최악의 시간이 걸림
- 우선순위 큐에 가장 많은 노드, 거리 정보가 들어가는 시나리오는 그래프의 모든 간선이 검사될 때마다, 배열의 최단 거리가 갱신되고, 우선순위 큐에 노드/거리가 추가되는 것임
- 이 때 추가는 각 간선마다 최대 한 번 일어날 수 있으므로, 최대 O(E)의 시간이 걸리고, O(E) 개의 노드/거리 정보에 대해 우선순위 큐를 유지하는 작업은 𝑂(𝑙𝑜𝑔𝐸)가 걸림
- 따라서 해당 과정의 시간 복잡도는 𝑂(𝐸𝑙𝑜𝑔𝐸)
총 시간 복잡도
- 과정1 + 과정2 = O(E) + 𝑂(𝐸𝑙𝑜𝑔𝐸) = 𝑂(𝐸+𝐸𝑙𝑜𝑔𝐸)=𝑂(𝐸𝑙𝑜𝑔𝐸))
참고: 힙의 시간 복잡도
- depth (트리의 높이) 를 h라고 표기한다면,
- n개의 노드를 가지는 heap 에 데이터 삽입 또는 삭제시, 최악의 경우 root 노드에서 leaf 노드까지 비교해야 하므로 h=log2n 에 가까우므로, 시간 복잡도는 O(logn)
4. 최소 신장 트리
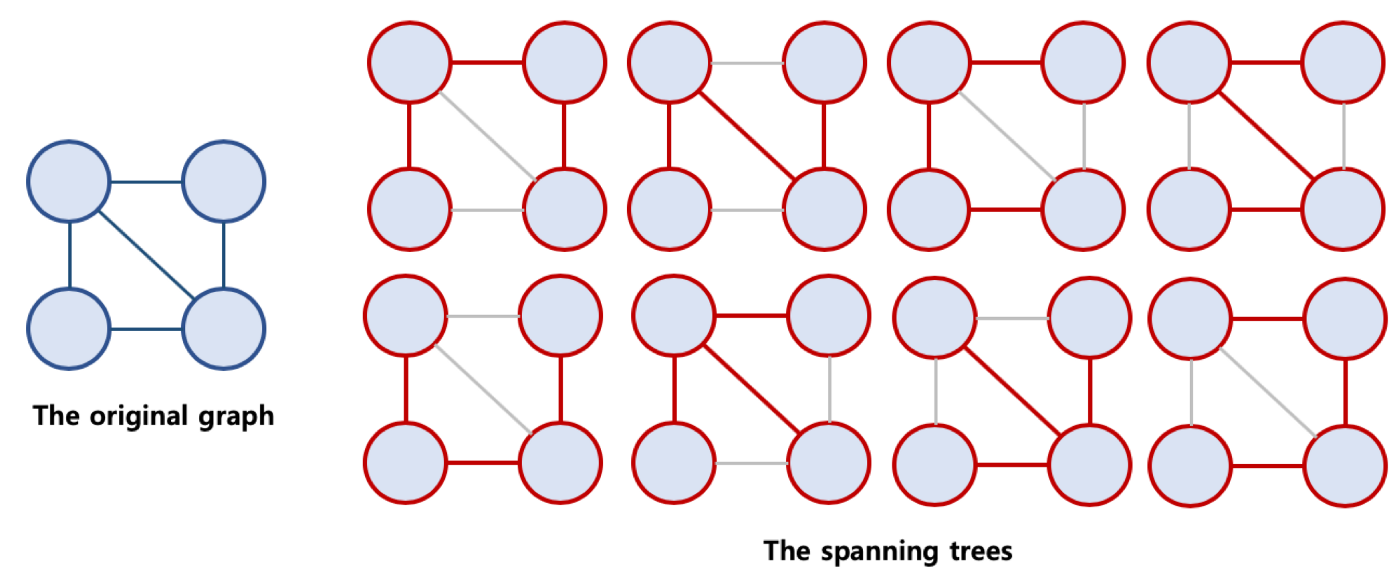
(1) 신장 트리 란?
- Spanning Tree, 또는 신장 트리 라고 불리움 (Spanning Tree가 보다 자연스러워 보임)
- 원래의 그래프의 모든 노드가 연결되어 있으면서 트리의 속성을 만족하는 그래프
신장 트리의 조건
- 본래의 그래프의 모든 노드를 포함해야 함
- 모든 노드가 서로 연결
- 트리의 속성을 만족시킴 (사이클이 존재하지 않음)
(2) 최소 신장 트리
- Minimum Spanning Tree, MST 라고 불리움
- 가능한 Spanning Tree 중에서, 간선의 가중치 합이 최소인 Spanning Tree를 지칭함

(3) 최소 신장 트리 알고리즘
- 그래프에서 최소 신장 트리를 찾을 수 있는 알고리즘이 존재함
- 대표적인 최소 신장 트리 알고리즘
- Kruskal’s algorithm (크루스칼 알고리즘), Prim’s algorithm (프림 알고리즘)
(4) 크루스칼 알고리즘 (Kruskal’s algorithm)
- 모든 정점을 독립적인 집합으로 만든다.
- 모든 간선을 비용을 기준으로 정렬하고, 비용이 작은 간선부터 양 끝의 두 정점을 비교한다.
- 두 정점의 최상위 정점을 확인하고, 서로 다를 경우 두 정점을 연결한다. (최소 신장 트리는 사이클이 없으므로, 사이클이 생기지 않도록 하는 것임)
- 탐욕 알고리즘을 기초로 하고 있음 (당장 눈 앞의 최소 비용을 선택해서, 결과적으로 최적의 솔루션을 찾음)


크루스컬 알고리즘의 시간 복잡도는 O(E log E)
다음 단계에서 2번, 간선을 비용 기준으로 정렬하는 시간에 좌우됨 (즉 간선을 비용 기준으로 정렬하는 시간이 가장 큼)
- 모든 정점을 독립적인 집합으로 만든다.
- 모든 간선을 비용을 기준으로 정렬하고, 비용이 작은 간선부터 양 끝의 두 정점을 비교한다.
- 퀵소트를 사용한다면 시간 복잡도는 O(n log n) 이며, 간선이 n 이므로 O(E log E)
3. 두 정점의 최상위 정점을 확인하고, 서로 다를 경우 두 정점을 연결한다. (최소 신장 트리는 사이클이 없으므로, 사이클이 생기지 않도록 하는 것임)
- union-by-rank 와 path compression 기법 사용시 시간 복잡도가 결국 상수값에 가까움. O(1)
(5) Union-Find 알고리즘
- Disjoint Set을 표현할 때 사용하는 알고리즘으로 트리 구조를 활용하는 알고리즘
- 간단하게, 노드들 중에 연결된 노드를 찾거나, 노드들을 서로 연결할 때 (합칠 때) 사용
Disjoint Set이란
- 서로 중복되지 않는 부분 집합들로 나눠진 원소들에 대한 정보를 저장하고 조작하는 자료구조
- 공통 원소가 없는 (서로소) 상호 배타적인 부분 집합들로 나눠진 원소들에 대한 자료구조를 의미함
- Disjoint Set = 서로소 집합 자료구조
- 초기화
- n 개의 원소가 개별 집합으로 이뤄지도록 초기화

2. Union
- 두 개별 집합을 하나의 집합으로 합침, 두 트리를 하나의 트리로 만듬
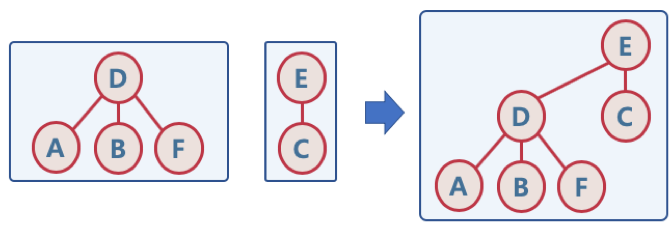
3. Find
- 여러 노드가 존재할 때, 두 개의 노드를 선택해서, 현재 두 노드가 서로 같은 그래프에 속하는지 판별하기 위해, 각 그룹의 최상단 원소 (즉, 루트 노드)를 확인

Union-Find 알고리즘의 고려할 점
- Union 순서에 따라서, 최악의 경우 링크드 리스트와 같은 형태가 될 수 있음.
- 이 때는 Find/Union 시 계산량이 O(N) 이 될 수 있으므로, 해당 문제를 해결하기 위해, union-by-rank, path compression 기법을 사용함

1) union-by-rank 기법
- 각 트리에 대해 높이(rank)를 기억해 두고,
- Union시 두 트리의 높이(rank)가 다르면, 높이가 작은 트리를 높이가 큰 트리에 붙임 (즉, 높이가 큰 트리의 루트 노드가 합친 집합의 루트 노드가 되게 함)
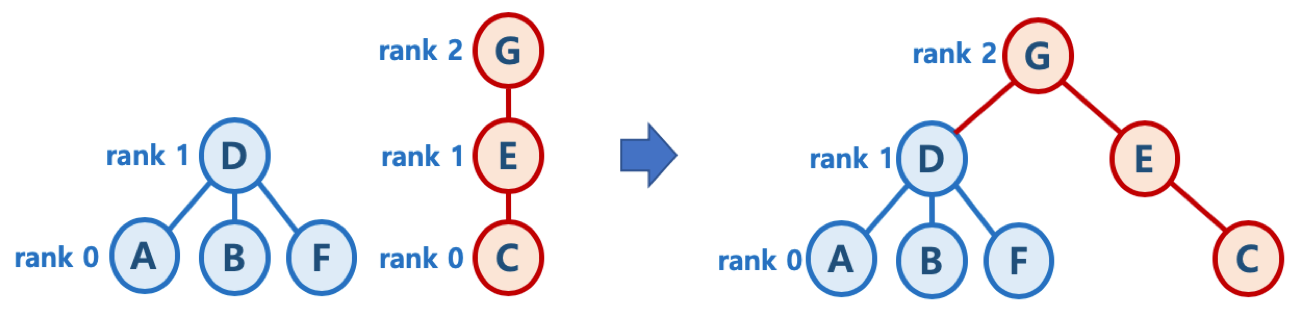
- 높이가 h — 1 인 두 개의 트리를 합칠 때는 한 쪽의 트리 높이를 1 증가시켜주고, 다른 쪽의 트리를 해당 트리에 붙여줌

- 초기화시, 모든 원소는 높이(rank) 가 0 인 개별 집합인 상태에서, 하나씩 원소를 합칠 때, union-by-rank 기법을 사용한다면,
- 높이가 h 인 트리가 만들어지려면, 높이가 h-1 인 두 개의 트리가 합쳐져야 함
- 높이가 h -1 인 트리를 만들기 위해 최소 n개의 원소가 있어야 한다면, 높이가 h 인 트리가 만들어지기 위해서는 최소 2n개의 원소가 있어야 함
- 따라서 union-by-rank 기법을 사용하면, union/find 연산의 시간복잡도는 O(N) 이 아닌, O(logN) 로 낮출 수 있음
2) path compression
- Find를 실행한 노드에서 거쳐간 노드를 루트에 다이렉트로 연결하는 기법
- Find를 실행한 노드는 이후부터는 루트 노드를 한번에 알 수 있음

- union-by-rank 와 path compression 기법 사용시 시간 복잡도는 다음 계산식을 만족함이 증명되었음
- O(Mlog∗N)
- log∗N 은 다음 값을 가짐이 증명되었음
- N이 2의65536 제곱값을 가지더라도,log∗N 의 값이 5의 값을 가지므로, 거의 O(1), 즉 상수값에 가깝다고 볼 수 있음.

(6)프림 알고리즘
1) 프림 알고리즘 (Prim’s algorithm)이란?
대표적인 최소 신장 트리 알고리즘
- Kruskal’s algorithm (크루스칼 알고리즘), Prim’s algorithm (프림 알고리즘)
프림 알고리즘
- 시작 정점을 선택한 후, 정점에 인접한 간선중 최소 간선으로 연결된 정점을 선택하고, 해당 정점에서 다시 최소 간선으로 연결된 정점을 선택하는 방식으로 최소 신장 트리를 확장해가는 방식
Kruskal’s algorithm 과 Prim’s algorithm 비교
- 둘다, 탐욕 알고리즘을 기초로 하고 있음 (당장 눈 앞의 최소 비용을 선택해서, 결과적으로 최적의 솔루션을 찾음)
- Kruskal’s algorithm은 가장 가중치가 작은 간선부터 선택하면서 MST를 구함
- Prim’s algorithm은 특정 정점에서 시작, 해당 정점에 연결된 가장 가중치가 작은 간선을 선택, 간선으로 연결된 정점들에 연결된 간선 중에서 가장 가중치가 작은 간선을 택하는 방식으로 MST를 구함
2)그림으로 이해하는 프림 알고리즘
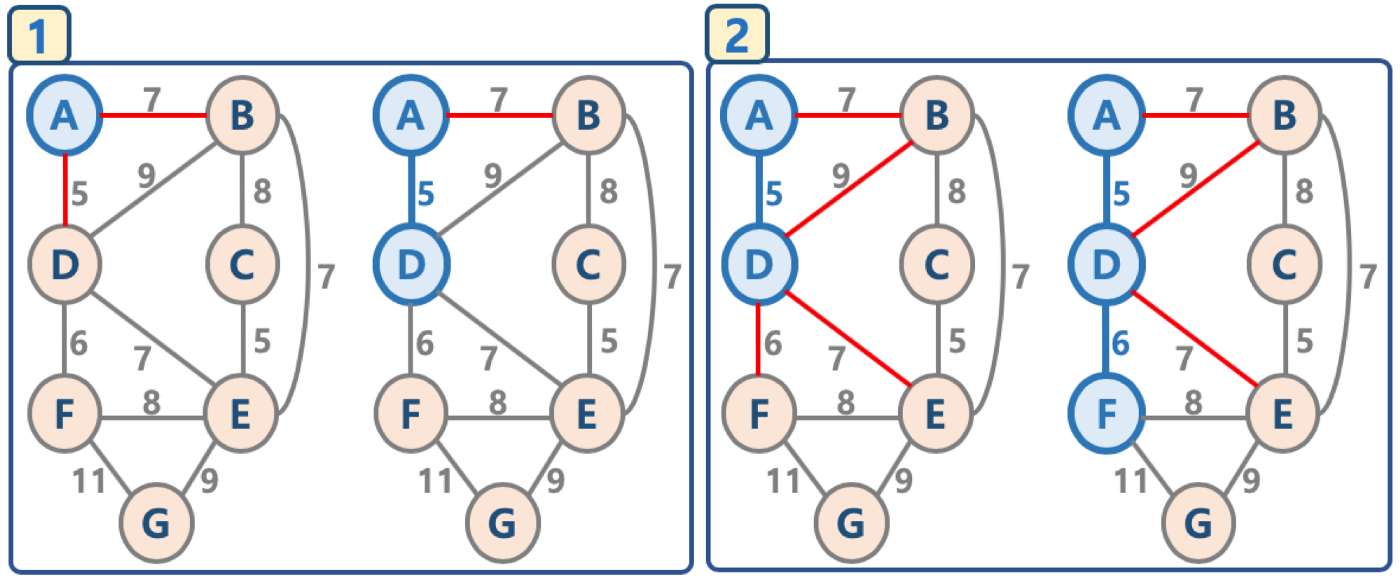
- 임의의 정점을 선택, ‘연결된 노드 집합’에 삽입
- 선택된 정점에 연결된 간선들을 간선 리스트에 삽입
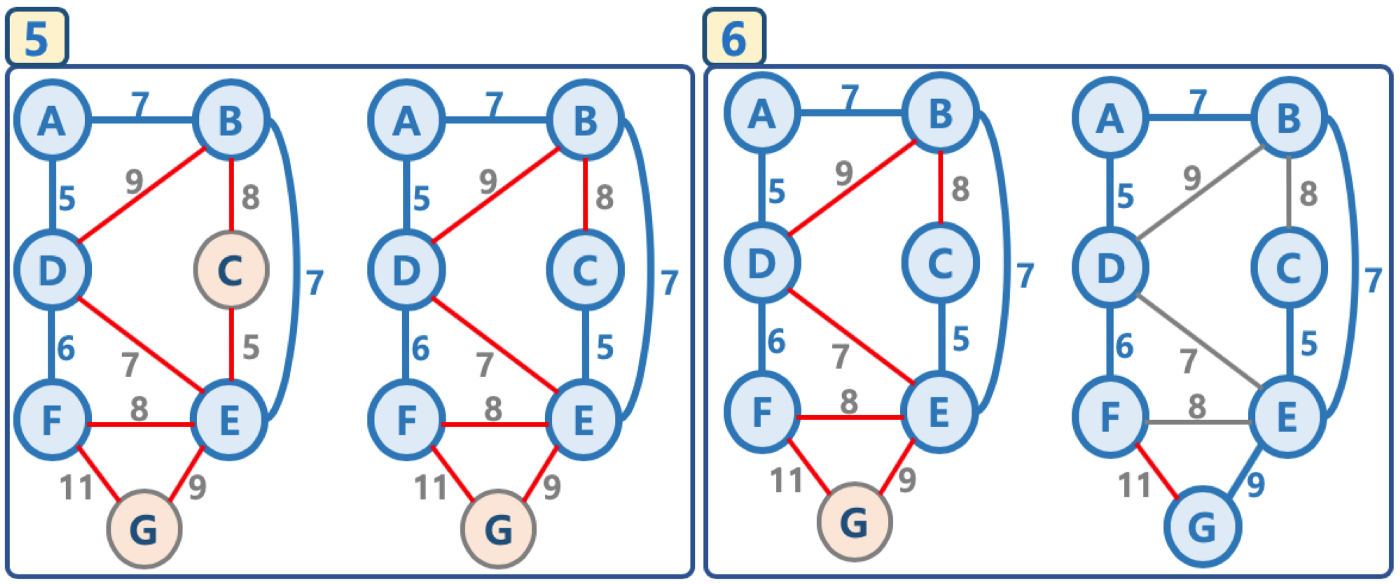
- 간선 리스트에서 최소 가중치를 가지는 간선부터 추출해서,
- 해당 간선에 연결된 인접 정점이 ‘연결된 노드 집합’에 이미 들어 있다면, 스킵함(cycle 발생을 막기 위함)
- 해당 간선에 연결된 인접 정점이 ‘연결된 노드 집합’에 들어 있지 않으면, 해당 간선을 선택하고, 해당 간선 정보를 ‘최소 신장 트리’에 삽입
4. 추출한 간선은 간선 리스트에서 제거
5. 간선 리스트에 더 이상의 간선이 없을 때까지 3–4번을 반복

프림 알고리즘 시간 복잡도
- 최악의 경우, while 구문에서 모든 간선에 대해 반복하고, 최소 힙 구조를사용하므로 O(ElogE) 시간 복잡도를 가짐
참고: 개선된 프림 알고리즘
- 간선이 아닌 노드를 중심으로 우선순위 큐를 적용하는 방식
- 초기화 — 정점:key 구조를 만들어놓고, 특정 정점의 key값은 0, 이외의 정점들의 key값은 무한대로 놓음. 모든 정점:key 값은 우선순위 큐에 넣음
- 가장 key값이 적은 정점:key를 추출한 후(pop 하므로 해당 정점:key 정보는 우선순위 큐에서 삭제됨), (extract min 로직이라고 부름)
- 해당 정점의 인접한 정점들에 대해 key 값과 연결된 가중치 값을 비교하여 key값이 작으면 해당 정점:key 값을 갱신
- 정점:key 값 갱신시, 우선순위 큐는 최소 key값을 가지는 정점:key 를 루트노드로 올려놓도록 재구성함 (decrease key 로직이라고 부름)
- 개선된 프림 알고리즘 구현시 고려 사항
첫째, 우선순위 큐(최소힙) 구조에서, 이미 들어가 있는 데이터의 값 변경시, 최소값을 가지는 데이터를 루트 노드로 올려놓도록 재구성하는 기능이 필요함
둘째, 구현 복잡도를 줄이기 위해, heapdict 라이브러리를 통해, 해당 기능을 간단히 구현
(참고) 개선된 프림 알고리즘의 시간 복잡도: O(ElogV)
- 최초 key 생성 시간 복잡도: O(V)
- while 구문과 keys.popitem() 의 시간 복잡도는 O(VlogV)
- while 구문은 V(노드 갯수) 번 실행됨
- heap 에서 최소 key 값을 가지는 노드 정보 추출 시(pop)의 시간 복잡도: O(logV)
- for 구문의 총 시간 복잡도는 O(ElogV)
- for 구문은 while 구문 반복시에 결과적으로 총 최대 간선의 수 E만큼 실행 가능O(E)
- for 구문 안에서 key값 변경시마다 heap 구조를 변경해야 하며, heap 에는 최대 V 개의 정보가 있으므로 O(logV)
- 일반적인 heap 자료 구조 자체에는 본래 heap 내부의 데이터 우선순위 변경시, 최소 우선순위 데이터를 루트노드로 만들어주는 로직은 없음. 이를 decrease key 로직이라고 부름, 해당 로직은 heapdict 라이브러리를 활용해서 간단히 적용가능
- 따라서 총 시간 복잡도는 O(V+VlogV+ElogV) 이며,
- O(V)는 전체 시간 복잡도에 큰 영향을 미치지 않으므로 삭제,
- E > V 이므로 (최대 V2=E 가 될 수 있음), O((V+E)logV) 는 간단하게 O(ElogV) 로 나타낼 수 있음
위의 내용은 패스트 캠퍼스 알고리즘 강의 자료(이준희 강사님 저)를 강의를 들으면서 정리한 내용입니다. ***